在一般的應用場合下,伺服電機已經可以達到很高的定位精度,但是在一些特殊情況下,例如機械傳動精度差,或者結構安裝偏差較大的情況下,會導致執行機構的實際定位精度達不到伺服電機的理論精度。在這種情況下,增加光柵尺與伺服電機構成全閉環系統,是一個非常簡便與極具性價比的改進方案。
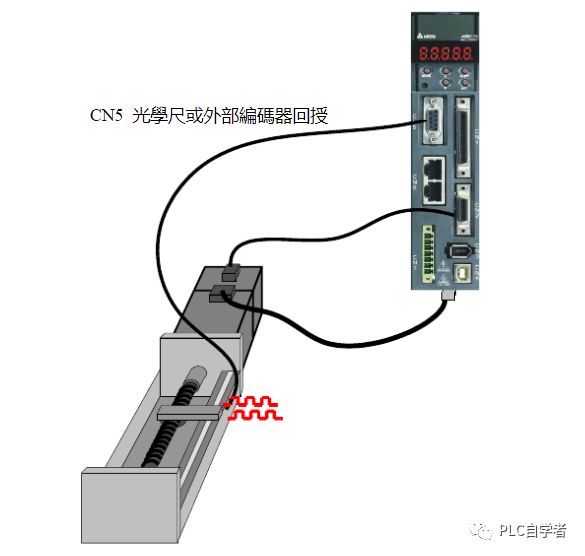
PLC通過脈沖控制伺服點擊進行定位,伺服電機外接光柵尺作為反饋信號,接入伺服電機驅動器的CN5端口,組成全閉環系統,進行精確定位。
PLC:s7-200 SMART
伺服電機驅動器:ASD-A2系列
光柵尺:AB相5V差分信號光柵尺,4倍頻后分辨率為0.005mm/pulse
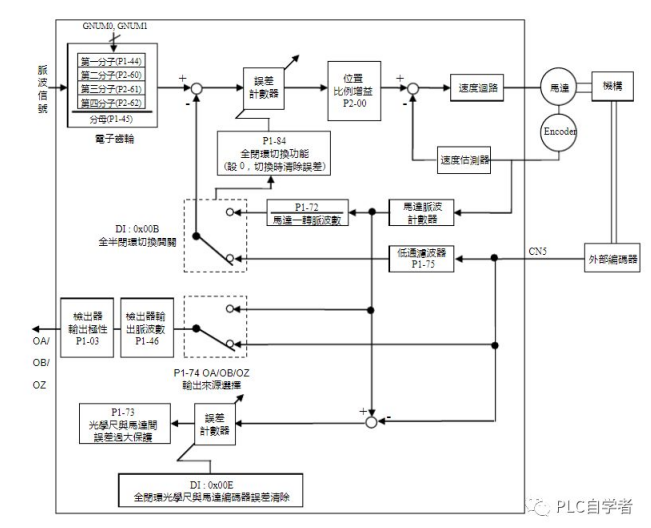
【全閉環控制架構】
伺服電機按照常規的方式連接好后,將光柵尺信號接入驅動器的CN5端口。注意,此處光柵尺信號需要選擇5V差分信號類型,驅動器CN5接線定義如下圖:

接線很簡單,將光柵尺對應的A+、A-、B+、B-、Z+、Z-及5V和GND線接入CN5口對應管腳即可。
線路接好后,需要對驅動器參數進行設置,才可使伺服電機工作在全閉環模式下,請按照如下步驟設置參數。
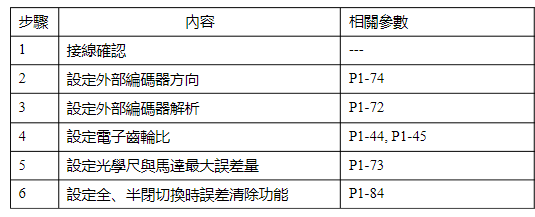
下面詳細講解一下參數如何設定:
1.全閉環功能參數,P1-74;
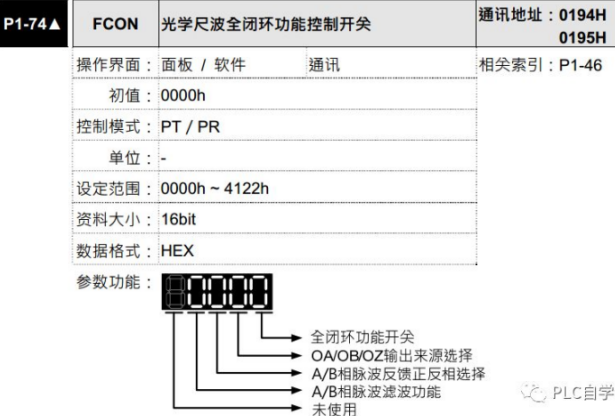
P1-74是設定全閉環控制功能的參數,有效控制位位4位,從右向左依次為第1~4位。
第1位:該位控制的是驅動器是否使用全閉環功能,具體參數釋義如下圖;
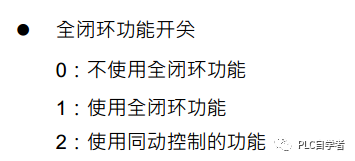
我們要使用全閉環功能,所以這一位設置為1。
第2位:CN5端口信號來源選擇,具體參數釋義如下;
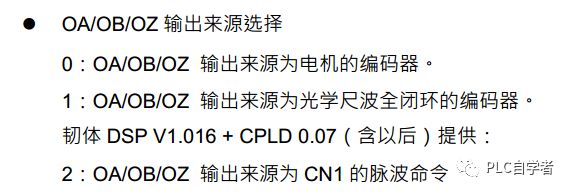
我們將光柵尺的信號接入了驅動器CN5口作為全閉環反饋信號的來源,所以這一位設置為1。
第3位:光柵尺A/B相相位選擇,具體參數釋義如下;
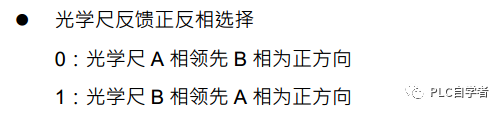
根據光柵尺安裝的情況及機構的運行方式,光柵尺反饋信號可能是A超前B也可能是B超前A,該參數需要根據實際安裝情況設定。此處假設為0;
第4位:此位為光柵尺反饋信號濾波功能設置,此處設置為0.
根據上述的參數分析,我們把P1-74參數設置為:00011。
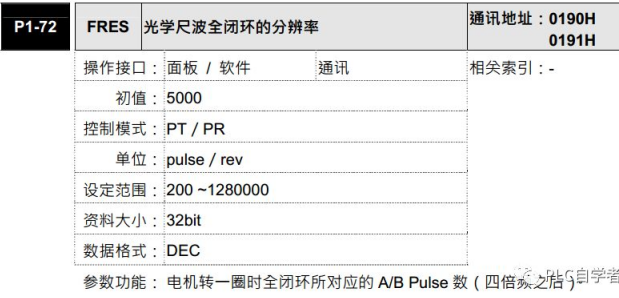
此參數表示當電機轉一圈時,光柵尺返回的脈沖數(4倍頻后)是多少,單位是pulse/轉。在此案例中,我們的絲桿導程選擇的為10mm。也就是說,伺服電機轉一圈時,絲桿行走距離為10mm。而我們選用的光柵尺分辨率為0.005mm/pulse,所以當絲桿行走10mm時,光柵尺返回脈沖數為(10÷0.005)=2000,即電機轉一圈,光柵尺返回脈沖數為2000個,所以P1-72設置為2000。
電子尺齒輪比的定義如下圖所示:
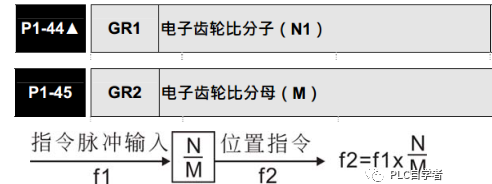
其中,f1為上位機發出的脈沖指令,f2為作用到伺服電機上的脈沖指令,N代表P1-44,M代表P1-45。
以轉1圈為例,假如我們希望伺服電機的行走精度為0.01mm/pulse,由于絲桿導程為10mm,所以電機轉一圈,上位機應該發出(10÷0.01)=1000個脈沖,即f1=1000。
由于電機只轉一圈,所以f2=光柵尺分辨率=2000。
f2/f1=N/M=P1-44/P1-45=2/1所以P1-44設置為2,P1-45設置為1。
至此,一個基于臺達ASD-A2系列伺服電機的基礎全閉環系統搭建已經完成,上位機通過脈沖控制伺服電機可以得到更高的控制精度了。
網站客服咨詢客服
熱線電話:
13962107506

 點擊立即咨詢
點擊立即咨詢